When riding an elevator, you want to get from floor to floor smoothly and safely. In an elevator drive, sophisticated motion control enables the elevator to stop in a designated position and slow down smoothly until it comes to a complete stop. The lack of sophisticated motion controls can cause the elevator to mistakenly stop between floors, which can make riders feel dizzy and uncomfortable or unsafe.
Robots, CNC machines, and factory automation equipment all require precise position control via servo drivers, in addition to, in many cases, precise speed control, in order to properly manufacture products and maintain workflow.
Many aspects of industrial actuators are very important to achieve precise motion control, which involves three basic subsystems in real-time control design, namely, induction, processing and drive. This article covers examples of supporting technologies for each subsystem.
Induction
Without precise position and velocity sensing, precise motion control cannot be achieved. Induction may include motor shaft angular position and speed induction or conveyor belt linear position and speed induction. Designers often use incremental optical encoders with hundreds to a thousand slots per revolution to sense position and speed. These encoders are usually connected to microcontrollers (MCU) via quadratically-coded pulses (Qeps) and therefore require QEP interface capabilities.
Absolute encoders, by contrast, are significantly more accurate, typically having more slots per revolution and being precisely installed to provide absolute angular position. The sensing location is converted into a digital representation and encoded according to a standard protocol. Examples of such protocols are Tamagawa's T-Format and iC-Haus GmbH's Bidirectional Serial Synchronization (BiSS) C. Previously, you also needed field programmable gate arrays (FPgas) to connect such encoders, but more and more MCUS now have this capability as well (see Figure 1 below).
Because T-Format and BiSS C protocols are generally different from those supported by popular communication ports or interfaces such as Serial Peripheral Interface (SPI), Universal Asynchronous Receiver Transmitter (UART), or Controller LAN (CAN) common on most MCUS, So they often require customizable logical blocks or proprietary processing units.
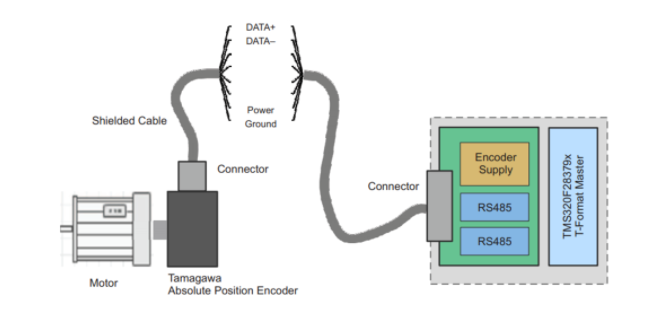
Figure 1: Absolute encoder connected to Texas Instruments control MCU
Absolute encoders can also be based on electromagnetic or class rotary transformer circuits, which require accurate measurement of sinusoidal electrical signals. Therefore, precision operational amplifiers and voltage benchmarks are also important. Motor and motion control always requires accurate motor current and voltage detection, especially when sensorless control is used. A common solution is low side detection using isolated/unisolated amplifiers and drivers that integrate low side current detection for inline and inverter bridge arms.
Deal with
The execution of motion control profiles and algorithms in precision motion control systems requires an MCU with high computing power. To provide the necessary precision and accuracy, such MCUS are typically 32-bit in word length and have native 64-bit floating-point support. Because the algorithm relies heavily on trigonometric, logarithmic, and exponential mathematics, many MCUS have hardware accelerators.
Considering the number of controlled axes of motion or the number of control loops, designers often adopt multi-central processing unit (CPU) architectures or CPU-like parallel accelerators. Multiple cpus may also be considered for additional monitoring and communication tasks.
As real-time control applications, the total delay of the entire signal chain (that is, the time from the collection of current, voltage, position, and velocity measurements to the updating of the control output) directly affects the control performance and therefore accuracy. Some MCUS feature on-chip analog comparators that directly generate control actions, significantly reducing latency and CPU load. Quick interrupt response and on-site saving and recovery are also important.
Just having high processing power is not enough. Motion control MCUS must also have universal control peripherals, such as 12-bit and 16-bit analog-to-digital converters, QEP interfaces, high-resolution edge and pulse capture, and pulsewidth modulation (PWM) output. The ability to implement custom logic and timing is also required.
To help designers get up to speed and adjust their designs, MCU and motor driver vendors offer motor and motion control algorithms, including core algorithms such as sensorless observers and software libraries as well as complete control codes with GUI configurable.
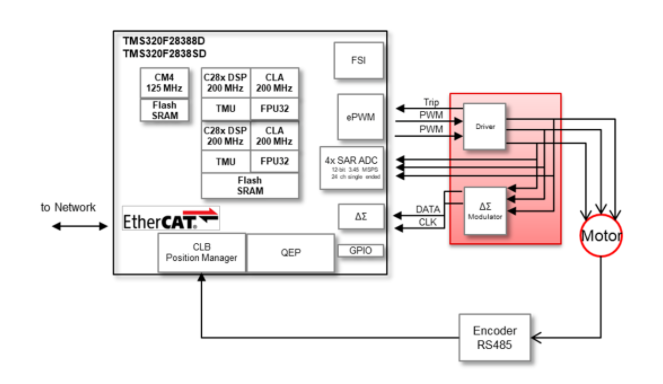
Figure 2: MCU of industrial drive
Drive
Power devices and drivers are required to provide the desired control action, usually in the form of PWM, with duty cycle representing the action. Precise control of the PWM pulse is important, which means that the driver must provide the necessary drive intensity with as little timing deviation as possible; Power devices must be turned on and off at exact predetermined times.
Today, such drives are widely available with additional features such as overcurrent and overheating protection. New wide band gap power devices ensure fast and accurate opening and closing timing. The fast switching speed and low switching loss of wide-band gap devices also enable fast control loops to improve stability and performance.
In addition to accuracy, many applications require that the motor control design be sufficiently compact and therefore require the use of drivers with integrated current detection and power supply modules.
Conclusion
Precision motion control is very important for industrial actuators. The technical solution involves all three basic subsystems of the real-time control design, namely induction, processing and drive, aiming to achieve precise motion control.
| Référence | Description | |
|---|---|---|
| TMS320C55AP2ZQWR Texas Instruments |
Embarqué - Processeurs de traitement numérique de signaux (DSP), INTEGRATED CIRCUIT BGA | RFQ |
| TMS320F2808PZAR Texas Instruments |
Embarqués - Microcontrôleurs, MICROCONTROLLER 16BIT | RFQ |
| TMS320F28076PZPS Texas Instruments |
Embarqués - Microcontrôleurs, DSP/DSC | RFQ |
| TMS320ACLZGU Texas Instruments |
Embarqués - Microcontrôleurs, INTEGRATED CIRCUIT BGA | RFQ |
| TMS320ACLAGGU Texas Instruments |
Embarqués - Microcontrôleurs, INTEGRATED CIRCUIT BGA | RFQ |
Traction inverters are the main battery drain components in electric vehicles (EVs), with power levels up to 150kW or higher. The efficiency and performance of traction inverter directly affect the driving range of electric vehicle after a single charge. Therefore, in order to build the next generation of traction inverter systems, silicon carbide (SiC) field effect transistor (FET) is widely used in the industry to achieve higher reliability, efficiency and power density.
Do you know the 8 application circuits of operational amplifiers?
This technical presentation requires an understanding of how to configure an operational amplifier in a typical gain control circuit. The applications of linear and nonlinear digital potentiometers are discussed. This article gives an overview of the basic techniques required to convert audio and other potentiometer/op amp applications from conventional mechanical potentiometers to solid state potentiometers
The current in an electronic circuit usually has to be limited. In USB ports, for example, excessive current must be prevented to provide reliable protection for the circuit. Also in the power bank, the battery must be prevented from discharging. Too high discharge current results in too large voltage drop of the battery and insufficient supply voltage of downstream devices
Using advanced real-time control technologies such as motor control circuits with higher power density, higher integration and more efficient systems, better acoustic performance of the system can be achieved
Brushless direct current (BLDC) motors have been widely used in household appliances, industrial equipment and automobiles. While brushless DC motors offer a more reliable and maintainable alternative to traditional brushless motors, they require more sophisticated electronics to drive them
How to achieve precise motion control in industrial actuators
The NCP51820 is a 650 V, high-speed, half-bridge driver capable of driving gallium nitride (" GaN ") power switches at dV/dt rates up to 200 V/ns. The full performance advantages of high voltage, high frequency and fast dV/dt edge rate switches can only be realized if the printed circuit board (PCB) can be properly designed to support this power switch. This paper will briefly introduce NCP51820 and the key points of PCB design of high performance GaN half bridge grid driver circuit using NCP51820